| Resolución de 14 y 16 bits | 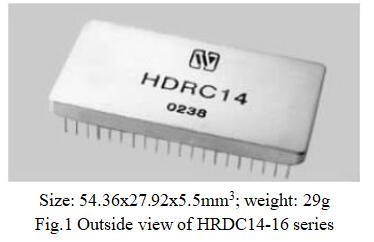 |
| Precisión de 4′ y 2′ | |
| Capacidad de la unidad de salida de 2VA | |
| Error de vector de radio bajo (0,03 %) | |
| Equipado con protección contra sobretensiones y protección contra cortocircuitos. | |
| Provisto de pin de salida telemétrica | |
| Sin necesidad de ajuste externo | |
| Compatibilidad pin a pin con el producto DRC1745/1746 de la empresa AD |
Conducir sincro/resolver; sistema de antena; servosistema; integrado
simulador.
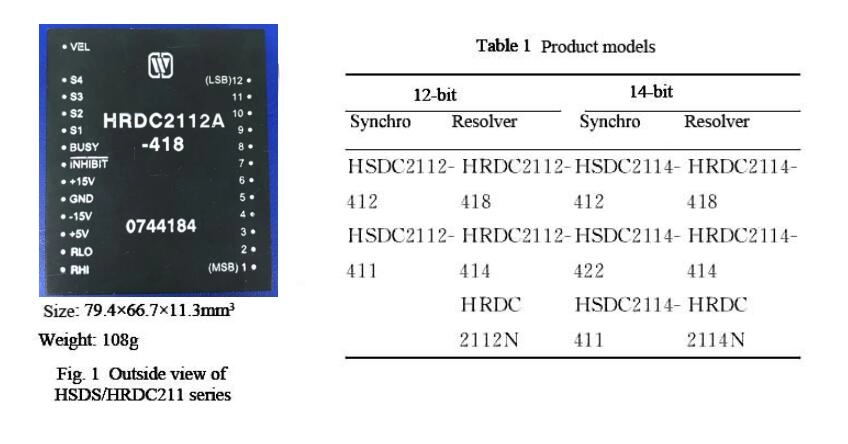
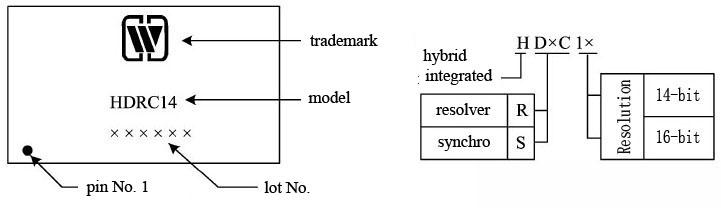
3. Descripción de la serie HDRC14-16 de convertidores de digital a sincronizado o convertidores de digital a resolver
El producto de la serie HDRC14/HDRC16 es un convertidor digital a resolver o
Convertidores digitales a sincronizados de estructura de circuito integrado híbrido.
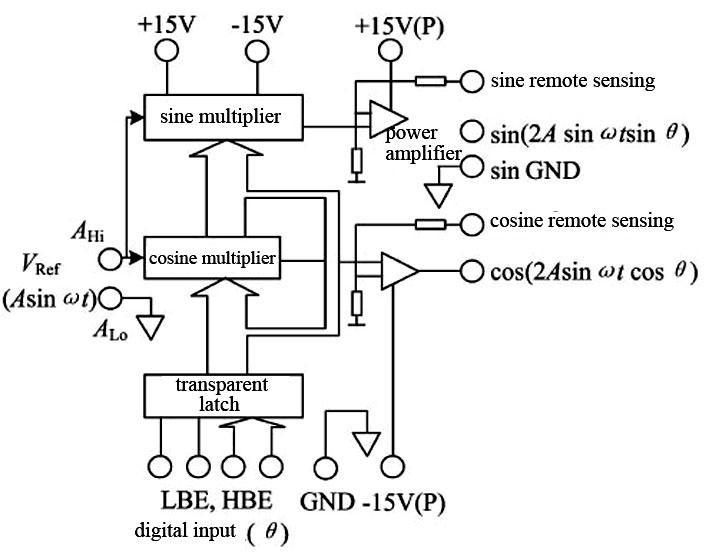
La carga puede ser carga inductiva, carga capacitiva o carga resistiva, y es | |
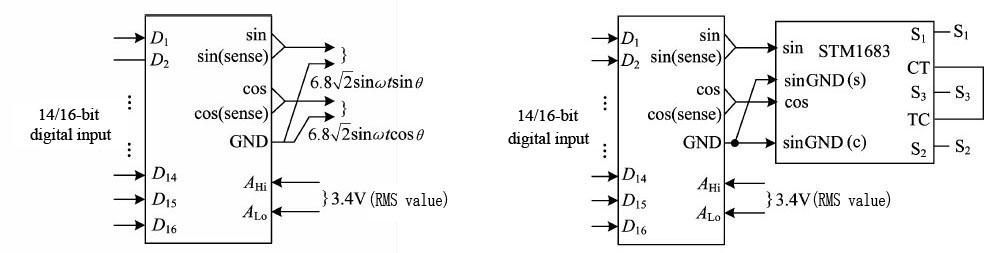
provistos de protección contra sobrecorriente y sobretensión. la salida de | El convertidor puede conducir directamente el resolver, y también puede conducir el Transformador de control de sincro conectando un transformador externo. El rendimiento único del producto de la serie HDRC14/HDRC16 es senoidal y |
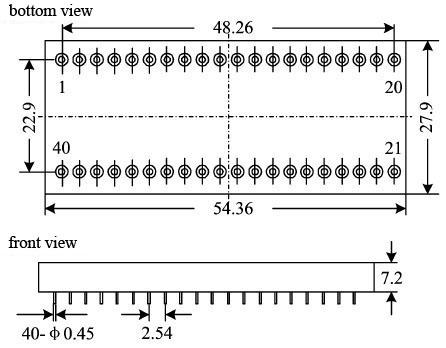
salida telemétrica coseno. Por lo tanto, al realizar la conducción de línea larga, puedegarantizar la precisión de la señal de salida convertida. | Los productos de la serie HDRC14/HDRC16 están equipados con pestillo interno, que se controla a través del extremo de habilitación de bit alto HBE y el extremo de habilitación de bit bajo LBE, y se puede conectar con bus de datos convenientemente. Los productos de la serie HDRC14/HDRC16 son paquetes de metal duales en línea de 40 pines. |
4. Rendimiento eléctrico (Tabla 1, Tabla 2) de la serie HDRC14-16 de convertidores de digital a sincronizado o convertidores de digital a resolver | ||||||
Tabla 1 Condiciones nominales y condiciones de funcionamiento recomendadas | máximo absoluto valor nominal | Tensión de alimentación Vs: ± 7,25 V | Voltaje lógico VL: +5.5V | Rango de temperatura de almacenamiento: -65 ℃ ~ + 150 ℃ | ||
Funcionamiento recomendado | condiciones | Tensión de alimentación Vs: ± 5V | Tensión lógica VL: +5V | |||
Frecuencia de referencia f: 400Hz~2000Hz | - | 14 | - | 16 | Rango de temperatura de funcionamiento TA: -55 ℃ ~ 125 ℃ | |
Tabla 2 Características eléctricas | - | Característica | - | ±2 | HDRC14 | |
HDRC16 | Unidad | Observaciones | mín. | máx. | V | |
mín. | máx. | Resolución | poco | Error de ángulo | V | |
±5,3 Minuto angular | Entrada de referencia analógica | 3.23 | 3.57 | 3.23 | V | |
3.57 | - | 25 | - | 25 | Salida de señal del resolver | |
6.46 | 0 | 7.14 | 0 | 6.46 | 7.14 | |
Ganar | (VRef-Vo) | - | 1.999 | - | kΩ | |
2.001 | - | 1.999 | - | 2.001 | Ω | |
Coeficiente de temperatura de la ganancia de salida | - | 2 | - | 2 | VA | |
PPM/℃ | - | Rango de frecuencia de entrada analógica | - | 2.6 | - | |
2.6 | kHz | Impedancia de entrada analógica | - | |||









 (2)Fuente de alimentación pulsante
(2)Fuente de alimentación pulsante
Zu003dcarga de salida | (3)Ejemplo de consumo de energía | Hay muchos factores que influyen en el consumo de energía, la | Los siguientes cuatro ejemplos usan cargas típicas y el peor ángulo digital | estado (45º). Estos ejemplos pueden ilustrar que el uso de energía pulsante | puede reducir el consumo de energía. | Aquí, las condiciones de funcionamiento son: | VCCu003d±15V; Vpu003d3V; Voutu003d9,6 V (el valor RMS es 6,8 V); VACu003d9.6V (aproximadamente | igual a Vsal.); I1u003d292mA (equivalente a una carga que requiere 1,4VA). |
1 | ① Fuente de alimentación CC, θu003d45º, carga resistiva | ② Igual que el ejemplo 1, la fuente de alimentación es una fuente de alimentación pulsante de 3V. | 13 | Cuando se utiliza la potencia pulsante, el consumo de energía interna se reduce en 1,75 W, su relación es de 3,2:1. | ③ Fuente de alimentación CC, θu003d45º, carga inductiva pura | 28 | ④ Igual que el ejemplo 3, la fuente de alimentación es una fuente de alimentación pulsante de 3V. | (4) Carga |
2 | D2 | A continuación, ilustraremos cómo calcular la carga. para el mando | 14 | transformador de sincro, primero se requiere obtener el valor de Zso, | que generalmente es proporcionado por el fabricante del sincronizador. El control | 29 | V- | la carga es: |
3 | D3 | Donde, V2 es el valor RMS del voltaje de la señal. | 15 | Si se agrega un transformador de salida en el pin de salida, se agregarán 0,25 VA a la potencia calculada. | Por ejemplo, suponga que el valor RMS de la señal es 90 V, 400 Hz, use | 30 | V+ | Transformador de salida externo HRDC14 para accionar el transformador de control de |
4 | D4 | sincronizado El uso de un transformador externo es para aumentar el valor RMS de | 16 | salida de tensión de HRDC14 de 6,8 V a 90 V requerida por el control | transformador. | 31 | Para el transformador de control de sincro, Zso es 700+j4900. | Por lo tanto, la carga cuando se usa el transformador de control es: |
5 | D5 | ; luego, más el consumo de energía adicional del transformador, el consumo de energía total es 1.48VA. | Este método también se puede utilizar para la aplicación que utiliza el rotativo | NC | transformador de control, pero no es necesario multiplicarlo por 3/4. | 32 | LE | 6. Curva MTBF (Fig. 3) de la serie HDRC14-16 de convertidores de digital a sincronizado o convertidores de digital a resolver |
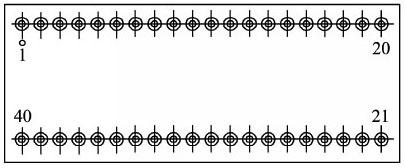
6 | D6 | Fig. 3 Curva de temperatura MTBF | 21 | (Nota: según GJB/Z299B-98, buen estado del terreno previsto) | 7. Designación de clavijas (fig. 4, Tabla 3) de los convertidores de digital a sincro o convertidores de digital a resolver de la serie HDRC14-16 | 33 | HE | Fig.4 Diagrama esquemático del pasador (vista inferior) |
7 | D7 | Tabla 3 Descripción funcional de los pines | 22 | Clavo | Símbolo | 34 | Función | Clavo |
8 | D8 | Símbolo | 23 | Función | Clavo | 35 | Símbolo | Función |
9 | D9 | D1(MSB) | 24 | Entrada digital de 1 bit | D13 | 36 | Entrada digital de 13 bits | GNDA |
10 | Tierra analógica | Entrada digital de segundo bit | 25 | D14 (LSB) | Entrada digital de 14 bits | -Fuente de alimentación de 15V | NC | Entrada digital de 3.er bit |
11 | D15 | Entrada digital de 15 bits | 26 | +15V Fuente de alimentación | Entrada digital de 4 bits | |||
12 | D16 (LSB) | Entrada digital de 16 bits | 27 | V1+ | +5V Fuente de alimentación |
Extremo de salida de coseno | Selección alta de 8 bits habilitada | Entrada digital de 7 bits | Vsen | Extremo de salida sinusoidal | RLo | |
1 | Extremo inferior de la entrada de referencia | 7 | Entrada digital de 8 bits | 13 | V+P | |
2 | +15V potencia pulsante | 8 | RHola | Entrada de referencia de gama alta | Entrada digital de 9 bits | |
3 | VP | 9 | -15V de potencia pulsante | 15 | Caso | |
4 | terreno del caso | 10 | D10 | Entrada digital de décimo bit | porque la telemetría | |
5 | Extremo telemétrico del coseno | 11 | 37-40 | |||
6 | Sin conexión | 12 | D11 |
sin telemetría | Extremo telemétrico sinusoidal |
 | |
requerido, entonces "HBE" y "LBE" pueden ser de circuito abierto. | Todos los pines de entrada digital tienen una resistencia de pull-up de 27 kΩ en el interior para ser | conectado con una fuente de alimentación de 5 V, por lo tanto, si hay una corriente de 50 μA en cualquier entrada de pestillo | pin se filtra a la unidad digital externa, aún puede garantizar todas las entradas | Los pines compatibles con el nivel TTL son estables. | 8. Tabla de valores de peso (Tabla 4) de la serie HDRC14-16 de convertidores de digital a sincronizado o convertidores de digital a resolver | Tabla 4 Tabla de valores de peso | Bit/(MSB) | Ángulo |
Bit/(MSB) | Ángulo | Bit/(MSB) | Ángulo | 180.000 0 | 2.812 5 | 0.043 9 | 90.000 0 |

Subscribe to our weekly newsletter and receive exclusive offers on products you love!
 X
X




















 Gold Supplier
Gold Supplier